Hi Alfonso,
don’t worry I’ve just compiled the object, we have to test it a little bit and tomorrow we’ll put in the Forumnet.
Thanks a lot for your help.
Best
Riccardo
Hi Alfonso,
don’t worry I’ve just compiled the object, we have to test it a little bit and tomorrow we’ll put in the Forumnet.
Thanks a lot for your help.
Best
Riccardo
thanks Riccardo!
best
a.
ok, the windows version of the leap motion object is ready for download.
Please read the README inside the package, you have to copy a dll in the right place.
Best
Riccardo
Thanks Riccardo!
now i’m not at home (where my leapmotion is)
I’ll do some test tomorrow.
Can you upload the Visual Studio project too?
I’d like to learn what i’m doing wrong in setting the VS project for compiling the external.
Many thanks!
best
a.
oh…and where is the download?
i dont’t find neither here http://ismm.ircam.fr/leapmotion/ and here https://forge.ircam.fr/p/leapmotion/downloads/
you can download the object from the forumnet:
http://forumnet.ircam.fr/shop/en/forumnet/54-gesture-follower.html
Jules will update the sources (with the VS project) soon.
Thanks a lot Riccardo!
@ALFONSOSANTIMONE: I updated the downloads on the Forge.
The object is now also hosted on the “Gesture&Sound” page: http://forumnet.ircam.fr/shop/en/forumnet/54-gesture-follower.html
I will put the VS project on the forge tomorrow.
Best,
Jules
Thanx Jules!
best
hi Jules!
did you managed to upload the VS project on forge?
thanks and best!
a.
Hi Alfonso,
I just committed the win-VS project on the Forge with Riccardo.
We are not providing the Max and Leap Motion SDKs: you have to download them yourself and modify the paths in the project settings accordingly (you’ll need to change the header and library paths to point to the right location).
Hope it helps!
Best,
Jules
Hi Jules,
thanks.
Which version of VS do you use to compile? I’m on VS2012 Express
I have this error
Error 1 error MSB8020: The builds tools for v120 (Platform Toolset = ‘v120’) cannot be found. To build using the v120 build tools, either click the Project menu or right-click the solution, and then select “Update VC++ Projects…”. Install v120 to build using the v120 build tools. C:\Program Files (x86)\MSBuild\Microsoft.Cpp\v4.0\V110\Microsoft.Cpp.Platform.targets 44 5 leapmotion
VS2013 Express
Thanx Riccardo and Jules!
It does compile correctly with VS2013.
I’ll study and explore all the project settings to help my compiling adventures ( i’m studing some max external developing in my spare time ).
Count me in for testing or any help here and on other projects.
thanks again
best
a.
Hello Jules,
I am a beginner, I have downloaded the Leapmotion for Max and it does work with my Leap Motion. A naive question, do you have a tutorial ( or an example) for concrete implement? e.g combine with sfrecord~, sfplay~, or even with jit.grab, it.qt.movie etc… as a installation using. thanks!
best
Shing-kwei
Hi Shing-kwei,
Thanks for the interest!
We developed the leapmotion external for experimenting in the research team, but we did not release any example of use for sound control so far.
The only other example you can find is a patch for gesture recognition with the leapmotion in Mubu (see http://forumnet.ircam.fr/product/mubu/).
To get started, I advice you to experiment with connecting some high-level parameters from the tracking (for example, the position/speed of the hands) to sound control parameters, and then iterate with other parameters form the skeleton tracking.
We will make announcements on the forum if we make more example patches public in the future.
Best,
Jules
thanks! Jules.
Shing-kwei
thanks! Jules.
Shing-kwei
Hi Jules,
I have started using your external, and I’m trying to zoom in and out with the jit.render object. Usually, it’s done with the z axis of the camera object. But it only seems to rotate the object (which makes sense). I’m using the help patch as a basis.
Is there anything we should take into account to achieve the zoom?
Thank you
Coralie
Hi Jules, thank you for this link and for the leap max object. Works great… but I trying to understand something:
I am doing a BA project on interaction within a 3d world… and would love to implement your leap object to interact with other jit.phys.body
Unfortunately the jit.gl.sketch, which render the GL visualisation of the incoming data from the leap, are not a phys body them selves…therefore they cannot collide-interact with anything (??not sure if i am right here please help??)
Do you think is the best way of doing so? Or should I simply use the data from your leap patch and send it to jit.phys.body for interaction…I do like the fact of seeing the hand in order to interact within the 3d world.
Please see example
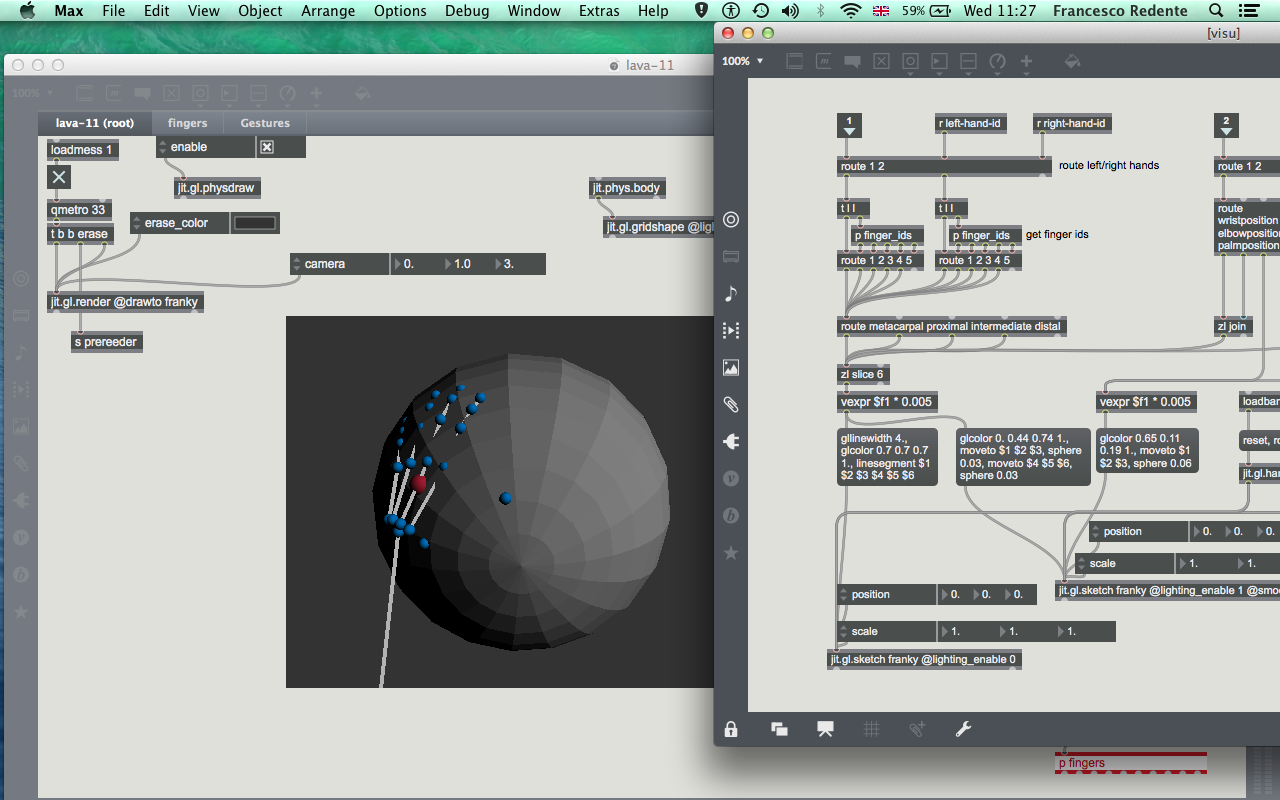
Bonjour Francesco,
Thank you for the message and for sharing your research.
Indeed, the leapmotion external was only made for streaming the data from the LeapMotion tracking within Max. The 3D sketch of the hand is just here to give a simple visualization of the skeleton, but it is probably not the right way to create interactions with 3D objects.
I guess you have 2 possibilities. Either you develop your own model of interaction to link the hand skeleton to actions upon 3D objects. Or you find a way to represent the hand itself as a 3D object within Jitter’s physical modeling framework, to take advantage of all the existing physical behaviors. I guess the second options seems more sensible; however, I never used jit.phys, so I can’t give you much advice on this part… Are there any existing 3D hand models that you could link to the skeleton to facilitate the control?
Don’t hesitate to share the progress of your project on the forum!
Best,
Jules